Materials
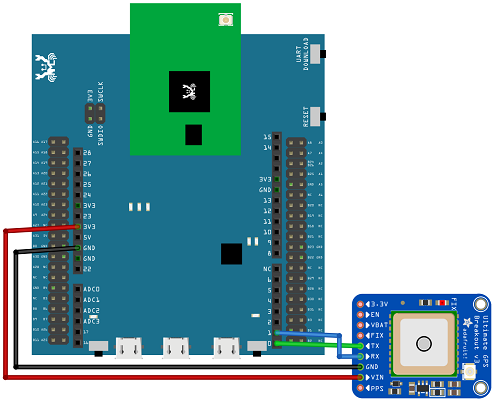
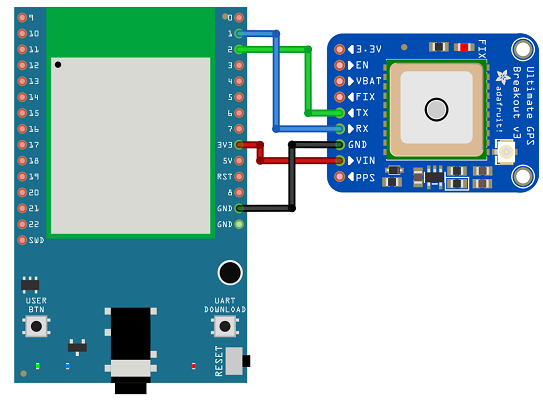
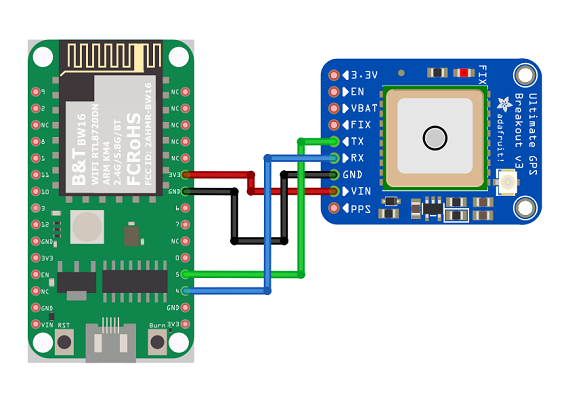
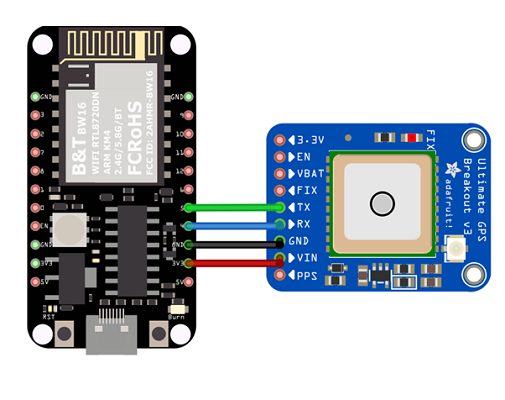
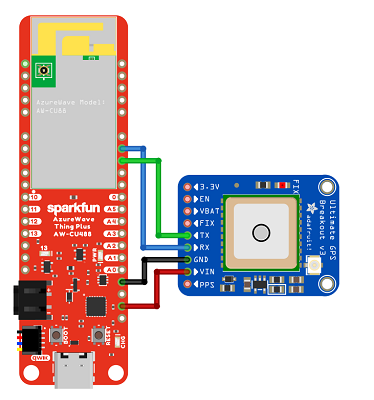
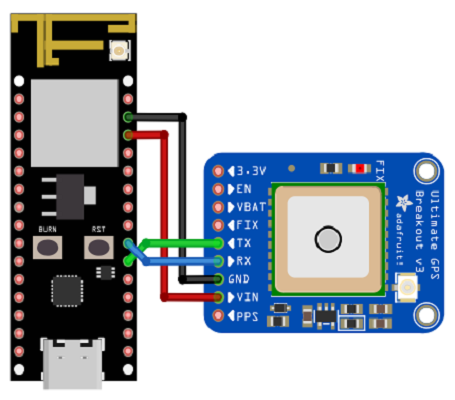
- AmebaD [ AMB23 / AMB21 / AMB22 / BW16 / AW-CU488 Thing Plus / AMB25 ] x 1
- Adafruit Ultimate GPS Breakout x 1 (Refer to official document)
Example
Introduction
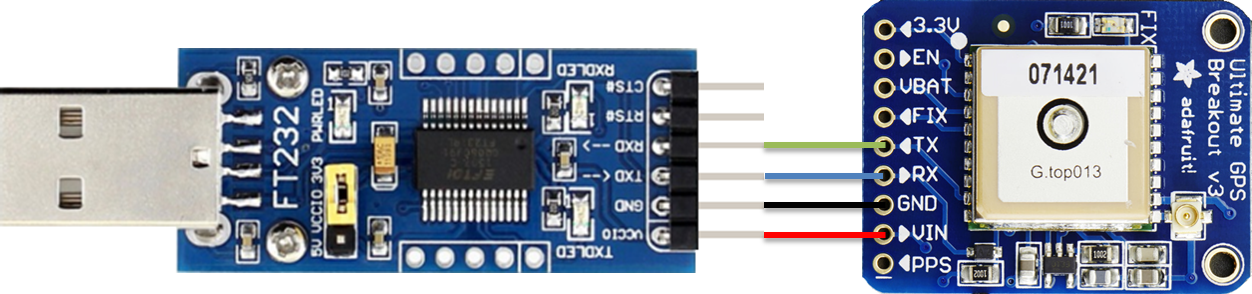
In this example, we use Adafruit Ultimate GPS Breakout. Its data format is pure text, so we can connect it to USB to TTL Adapter and observe the output.
Procedure
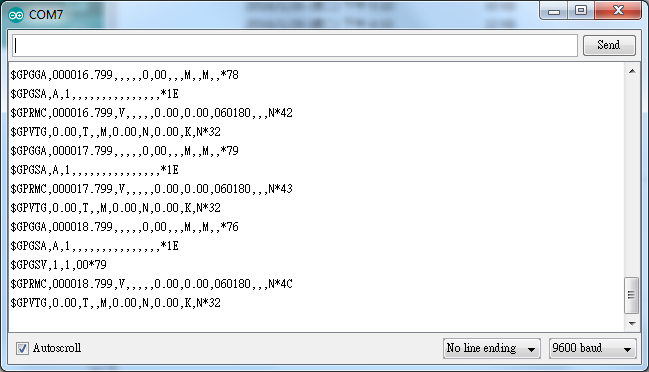
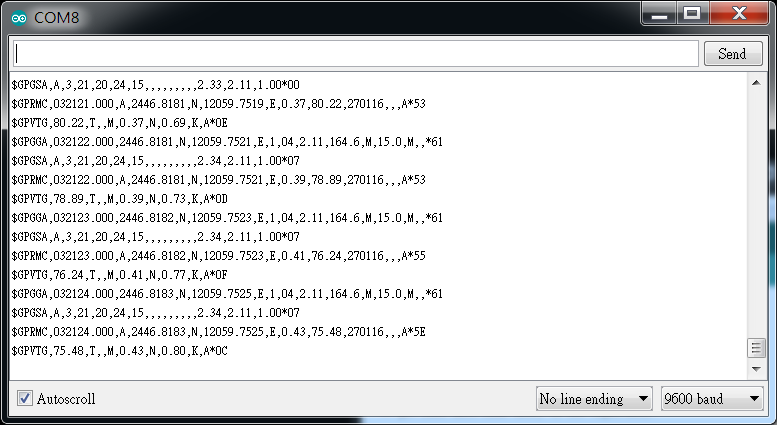
In this example we are only interested in the “$GPRMC (Global Positioning Recommended Minimum Coordinates)”:
Each field is separated by a comma.
- First field is the GMT time (Greenwich Mean Time), that is 032122.000 in this example. The time format is HH:MM:SS.SSS, i.e., 03:21:22.000. Note that the time zone and the daylight-saving time adjustment should be handled on your own.
- Second field represents the status code
- V: Void (Invalid)
- A: Active, meaning the GPS signal is fix.
- The third to sixth fields represent the geolocation
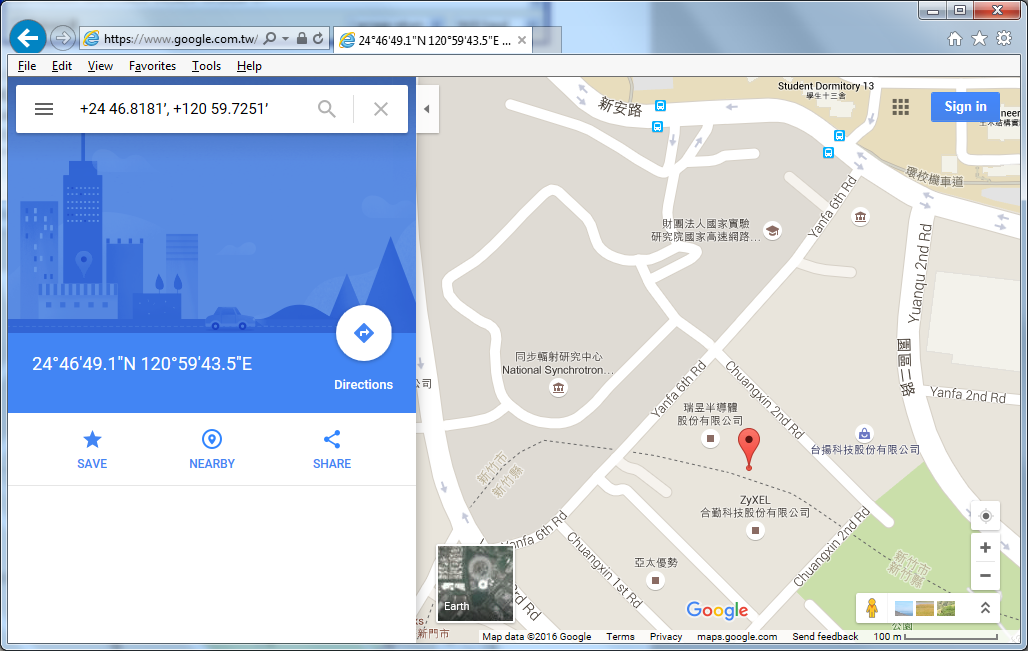
In this example, 2446.8181,N represents 24 degrees 46.8181 minutes north latitude, and 12059.7251,E represents 120 degrees 59.7251 minutes east longitude.
We can search
- The seventh field is relative speed(knot). 1 knot = 1.852km/hr. In this example the relative speed is 0.39 knots.
- The eighth field is the moving angle, which is calculated by its moving orbit.
- The ninth field is the date with format ddMMyy. In this example, “270116” stands for day 27, January, year 2016.
- The last field is the checksum. In the example we have *53 as checksum.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Open the example in “Files” -> “Examples” -> “AmebaSoftwareSerial” -> “Adafruit_GPS_parsing”.
Compile and upload to Ameba, then press the reset button.
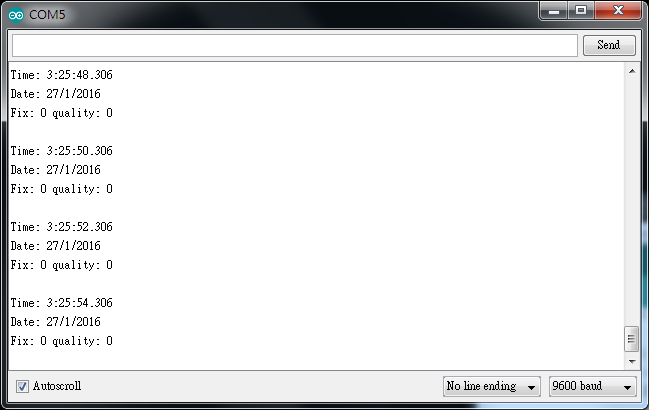
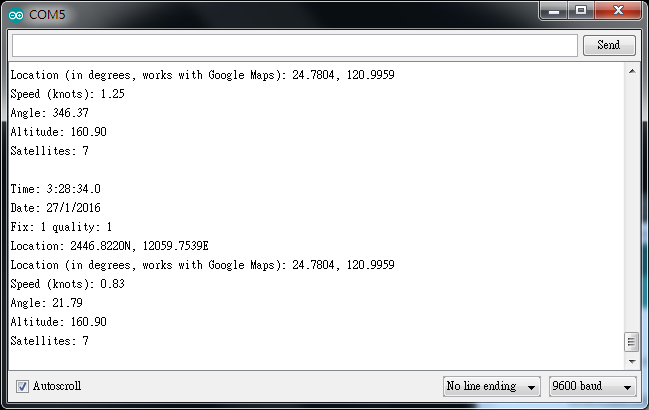
The result will be output to Serial Monitor: