Materials
- AmebaPro2 [ AMB82 MINI ] x 1
- MPU6050 x 1
Example
Introduction
This example will demonstrate getting the data from MPU6050 with DMP6. MPU6050 is equipped with a Digital Motion Processor (DMP) to handle the calculations of motion algorithms such as conversion to 3-axis yaw/pitch/roll of planes, conversion to quaternion, or conversion to Euler angle.
This guide will be the same for these 2 examples:
1) MPU6050_DMP6.ino
2) MPU6050_DMP6_using_DMP_V6v12.ino
The difference between these two examples is the DMP library being used. For MPU6050_DMP6.ino, the DMP library version is 2.0. For MPU6050_DMP6_using_DMP_V6v12.ino, the DMP library version is 6.12.
Procedure
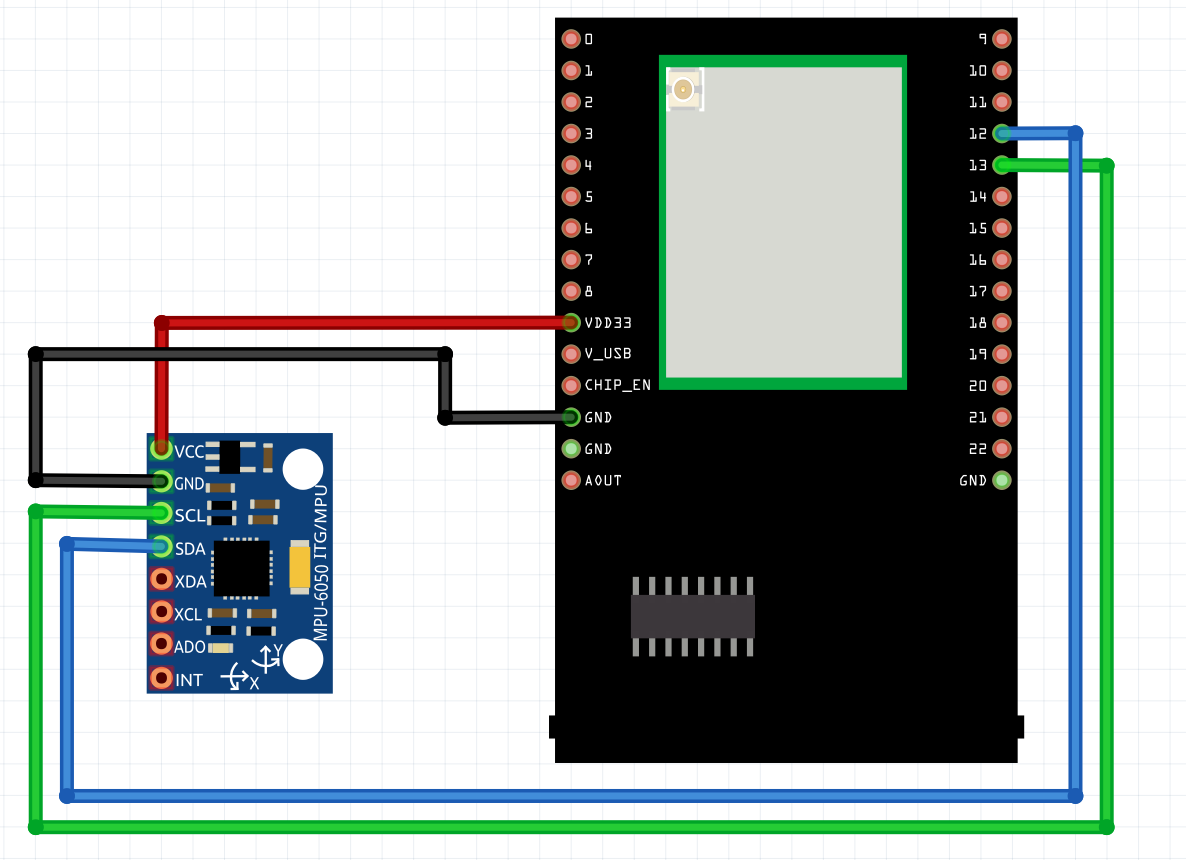
Connect the MPU6050 to I2C_SDA and I2C_SCL of the board as shown in the diagram below.
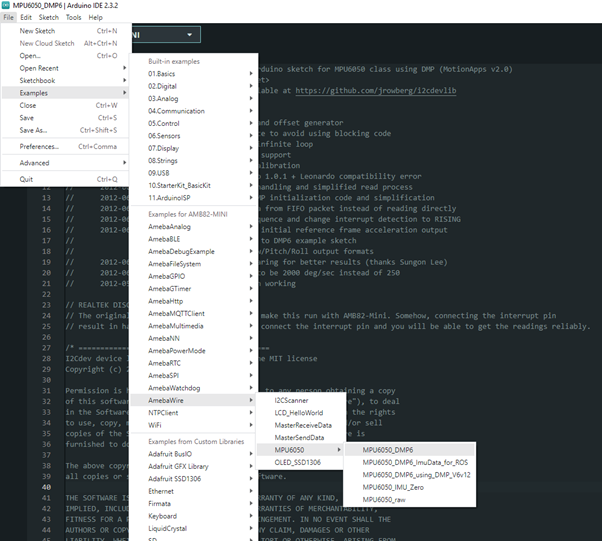
Open the example in “File” -> “Examples” -> “AmebaWire” -> “MPU6050”-> “MPU6050_DMP6” OR “MPU6050_DMP6_using_DMP_V6v12”
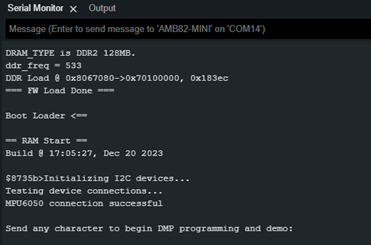
Compile and run the example. In the Serial Monitor, you should be able to see the prompt to begin DMP programming. Key in any character on the serial monitor and press ‘Enter’.
You should be able to see the output values calculated by the DMP.
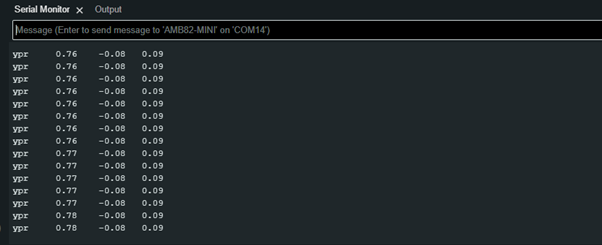
You can choose to uncomment either one of the options to see the type of data to be printed out. The options are OUTPUT_READABLE_QUATERNION, OUTPUT_READABLE_EULER, OUTPUT_READABLE_YAWPITCHROLL, OUTPUT_READABLE_REALACCEL, OUTPUT_READABLE_WORLDACCEL and OUTPUT_TEAPOT. In this example, the option used is OUTPUT_READABLE_YAWPITCHROLL.
The original example by ElectronicCats uses interrupt pin. Using Interrupt pin will cause MPU6050 to hang, so this example can only work reliably if no interrupt pin is used.
Code Reference
[1] MPU6050 library and examples by ElectronicCats:
https://github.com/ElectronicCats/mpu6050
