材料準備
- AmebaD [ AMB23 / AMB21 / AMB22 / BW16 / AW-CU488 Thing Plus / AMB25 / AMB26] x 1
- Android / iOS 手機 x1
- L9110S 伺服電機控制器 x1
- TT 馬達 x2
範例說明
介紹
在此示例中,我們將使用 AmebaD 作為 BLE 外圍設備和伺服電機控制器與 V7RC 行動應用程式進行通信。V7RC是一款遙控器APP,提供兩種控制UI:第一種是2通道遙控的遙控車,另一種則是4通道遙控的坦克和推土機。
流程
1. 建立藍牙連接
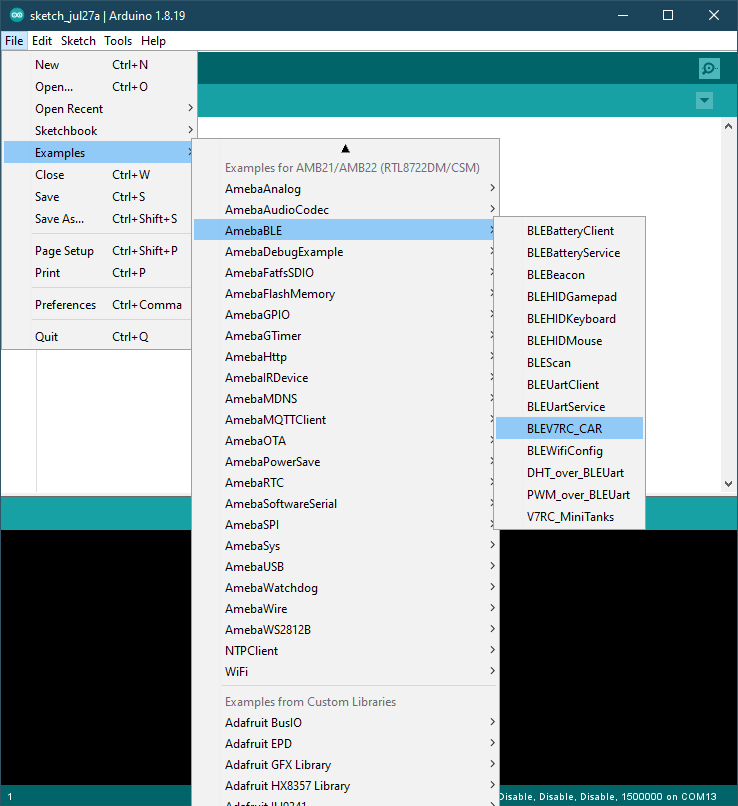
打開使用V7RC通過BLE遙控小車的範例, “Files” -> “Examples” -> “AmebaBLE” -> “BLEV7RC_CAR”:
上傳程式碼,上傳完成後按重置按鈕。
打開V7RC APP,選擇「控制中心」:

在「連結方式」中選擇「藍牙」:

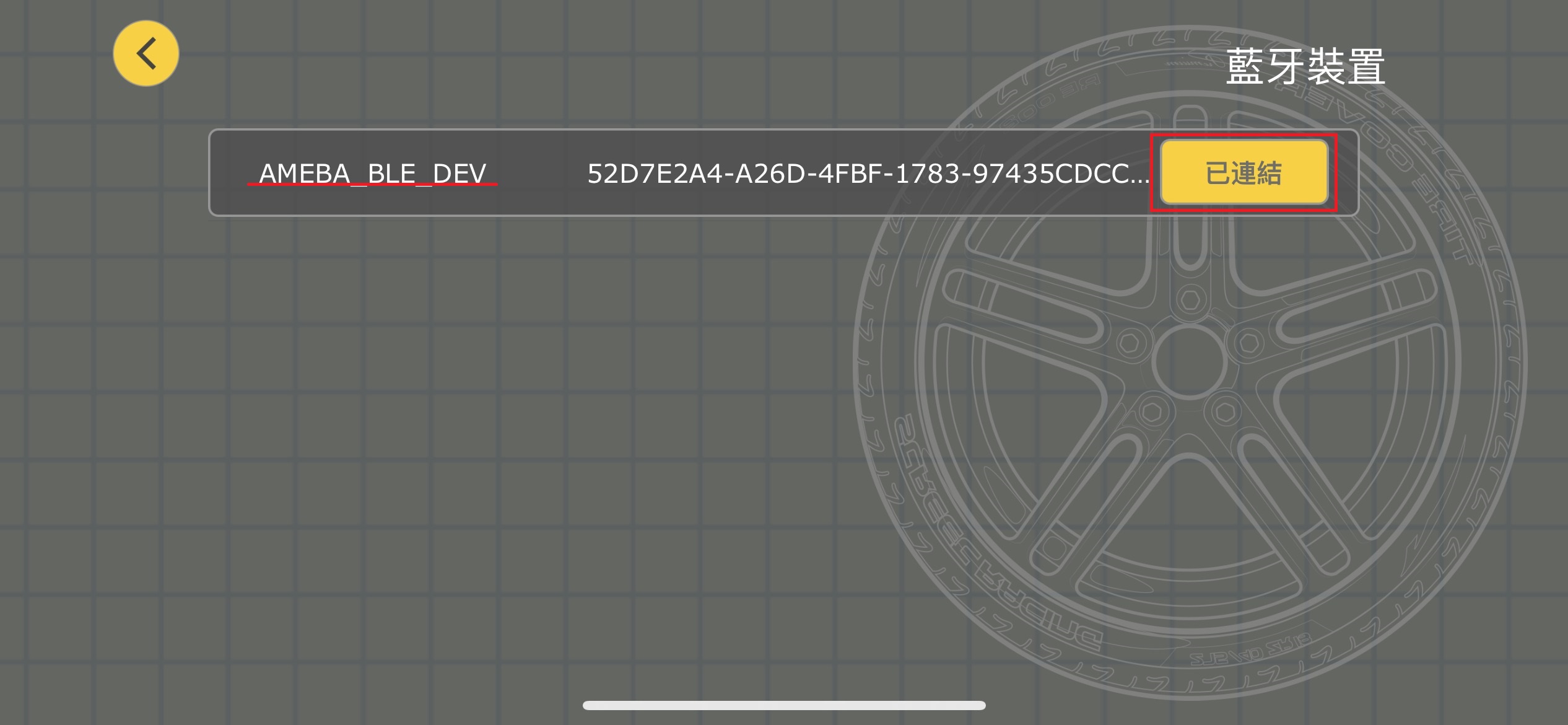
在「藍牙裝置」中選擇 AMEBA_BLE_DEV 並按下「連結」按鈕連接到 Ameba :
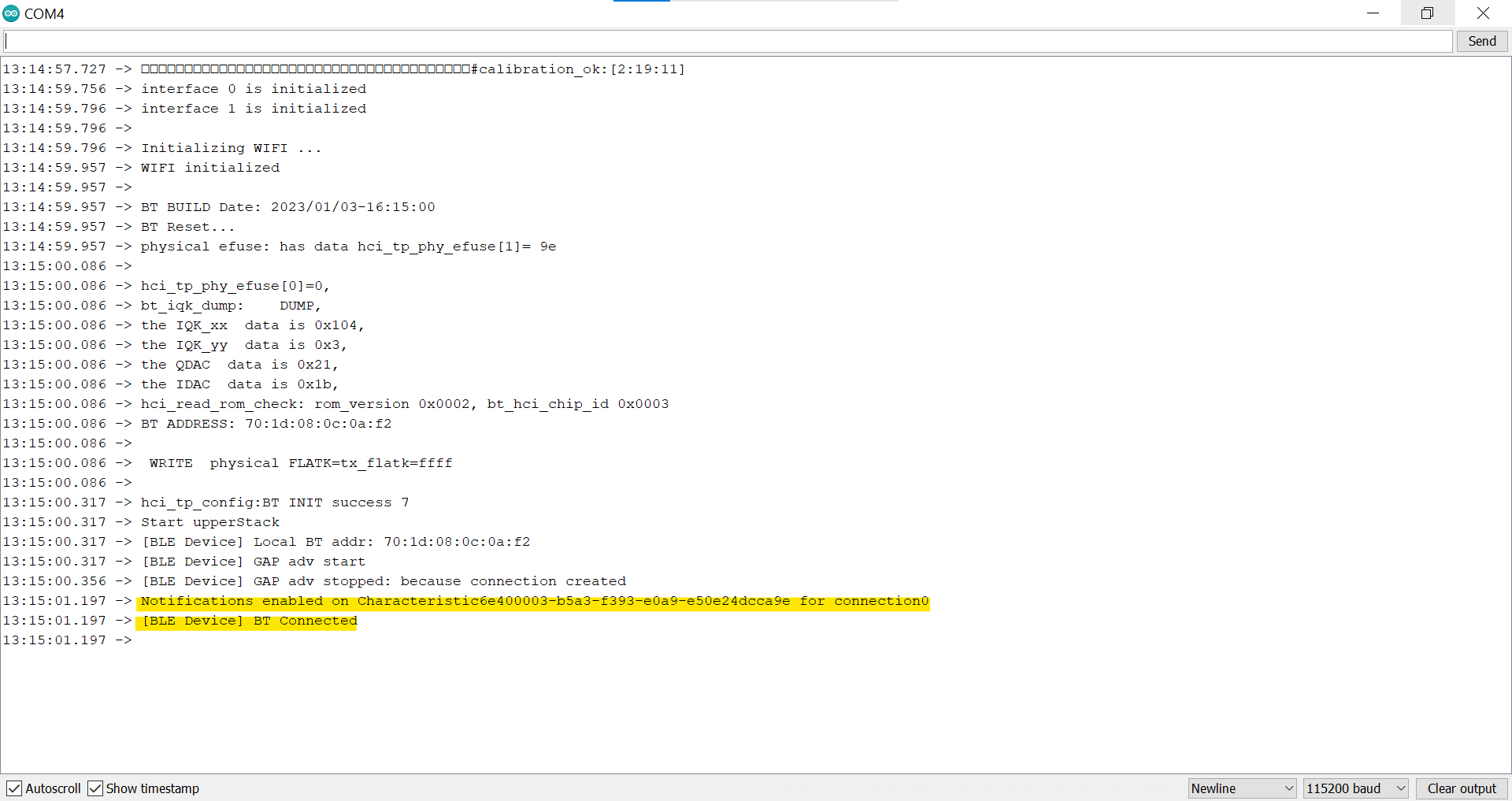
打開Arduino串行監視器,您應該會看到AmebaD已成功連接到手機APP的日誌:
返回 V7RC 主頁,您可以監控移動下圖所示的兩個控制器按鈕時收到的日誌列印數據。成功接收數據,表明已建立BLE連接:

2. 連結伺服電機
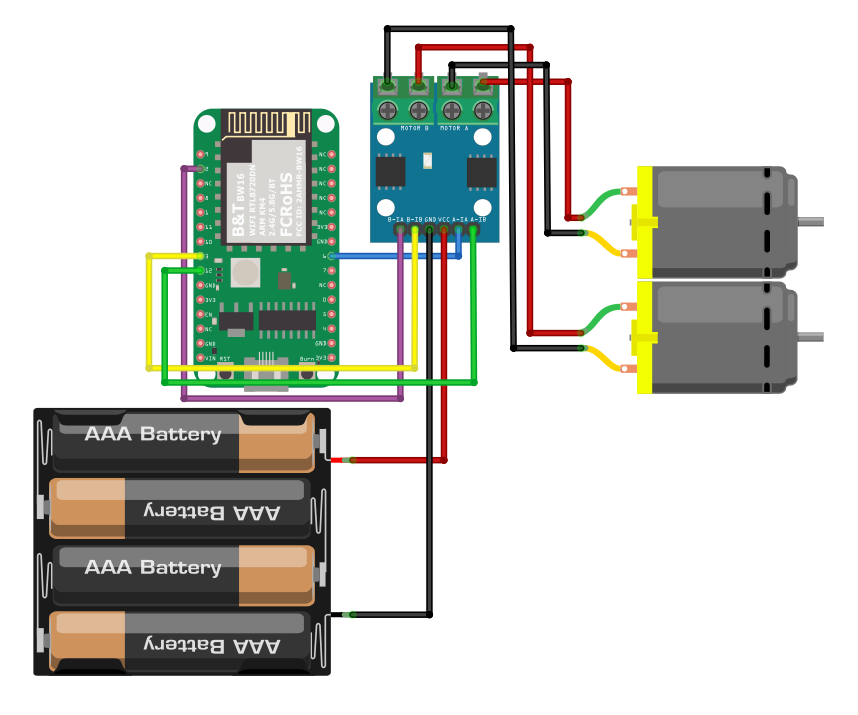
在成功使用藍牙將Ameba開發板連結到手機後,我們將使用兩組伺服電機來控制汽車的運動 (左輪和右輪)。首先,兩組伺服電機將使用預定義的MotoA_1A、MotoA_1B、MotoA_1B和MotoA_1B引腳連接到 L9110S 伺服控制器。
– 1A 引腳連接到開發板的GPIO引腳,用於控制電機方向
– 1B 引腳連接到開發板的PWM引腳,用於控制電機速度
#define MotoA_1A 6 // 控制電機A向前(HIGH)/向後(LOW)
#define MotoA_1B 12 // 控制電機A的速度 0~255,或停止(低)
#define MotoB_1A 2 // 控制電機B向前(HIGH)/向後(LOW)
#define MotoB_1B 3 // 控制電機B的速度 0~255,或停止(低)
在此示例中,我們將使以 BW16 爲例進行演示。詳細的連接引腳圖可以在下面找到。連接完成后,用戶可以通過 V7RC 應用程式的藍牙功能遠端控制伺服電機。
程式碼說明
ParseCMDString(String cmd) 是一個用戶自定義的函數。它將字符串“cmd”作為輸入並對其進行處理。目前,V7RC App 有 6 個可用的命令,分別是:“SS2”、“SS4”、“SRT”、“SR2”和“SRV”。
