材料準備
- AmebaD [ AMB23 / AMB21 / AMB22 / BW16 / AW-CU488 Thing Plus / AMB25 ] x 1
- HC-SR04 Ultrasonic x 1
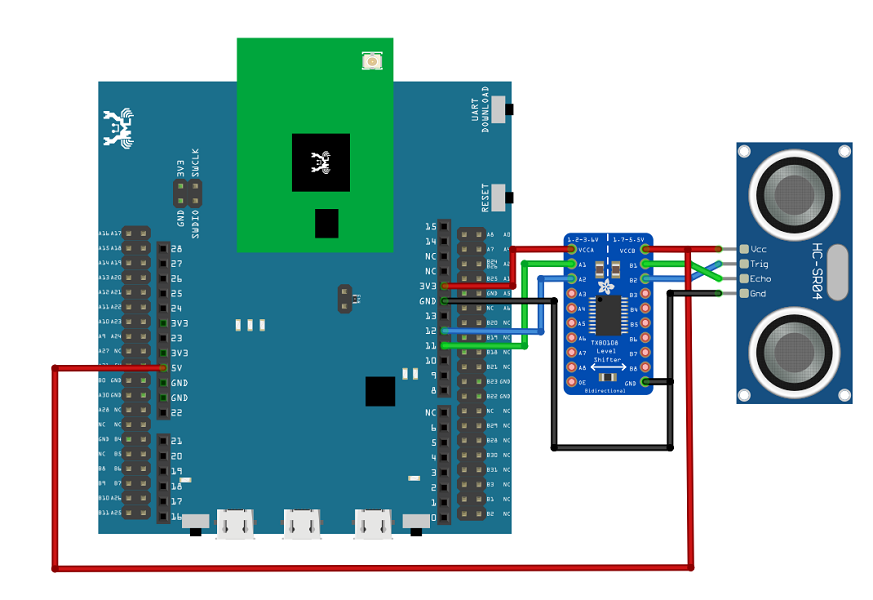
- 降壓電阻 或 Level converter
範例說明
介紹
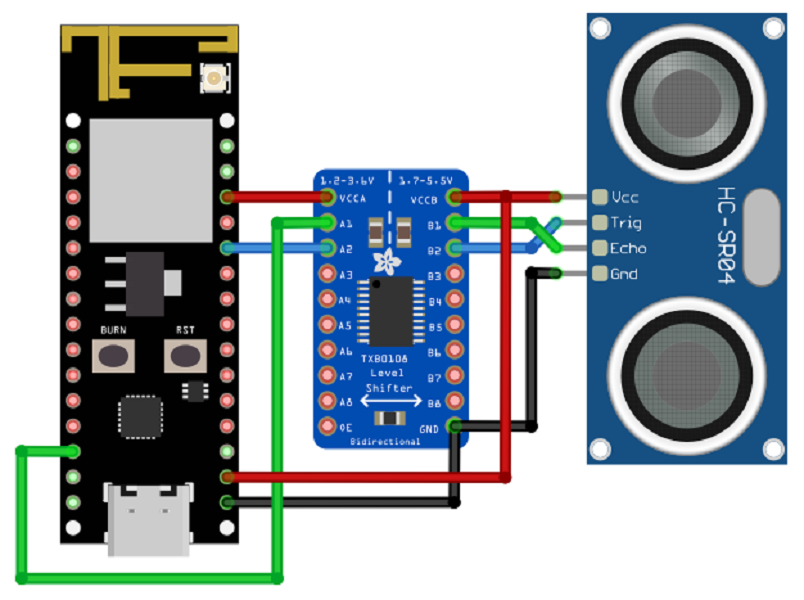
HC-SR04是一款超音波測距的模組,由於形狀像兩隻眼睛,所以常被裝在自走車或機械昆蟲上,兼俱美觀與實用的角色。它的運作方式,首先我們先在TRIG這根GPIO對它toggle high (即pull high再pull low) 。接著HC-SR04會發出8個40k Hz的音波訊號出去,並且將ECHO這根GPIO的訊號pull high。等到音波訊號回來,再將ECHO的GPIO pull low。
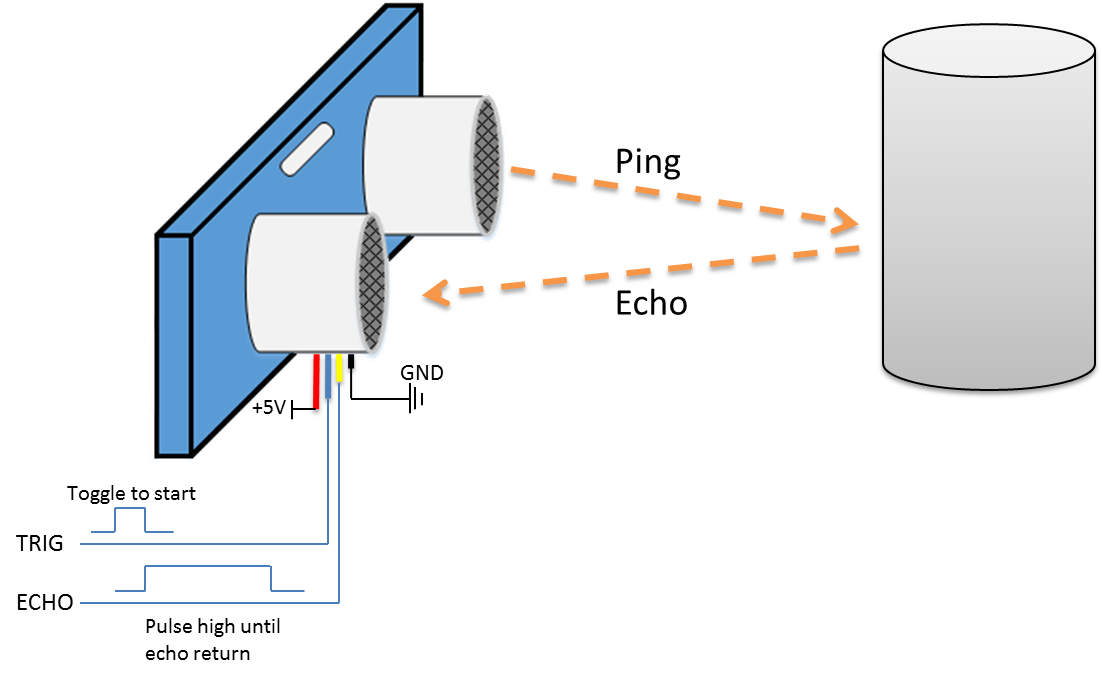
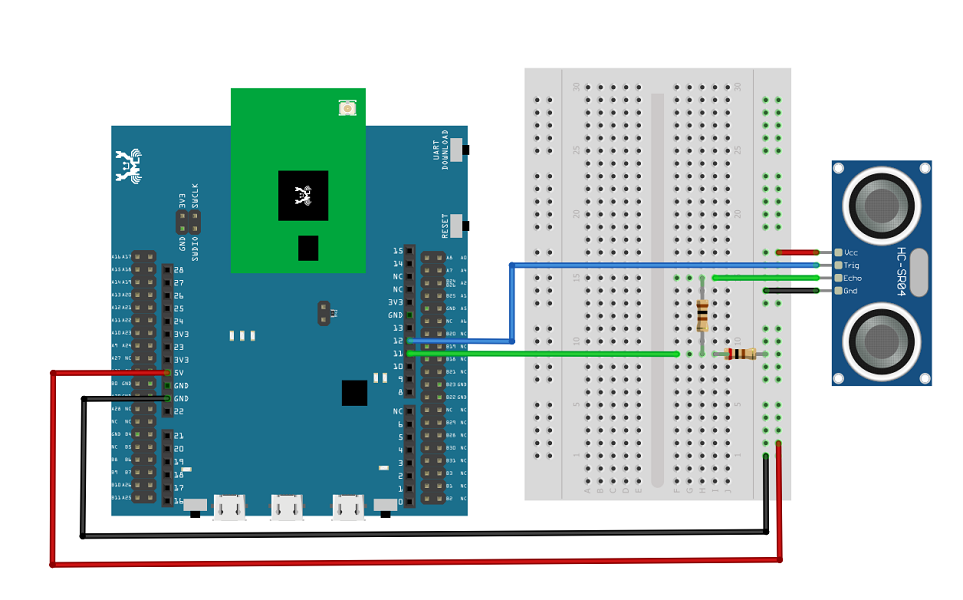
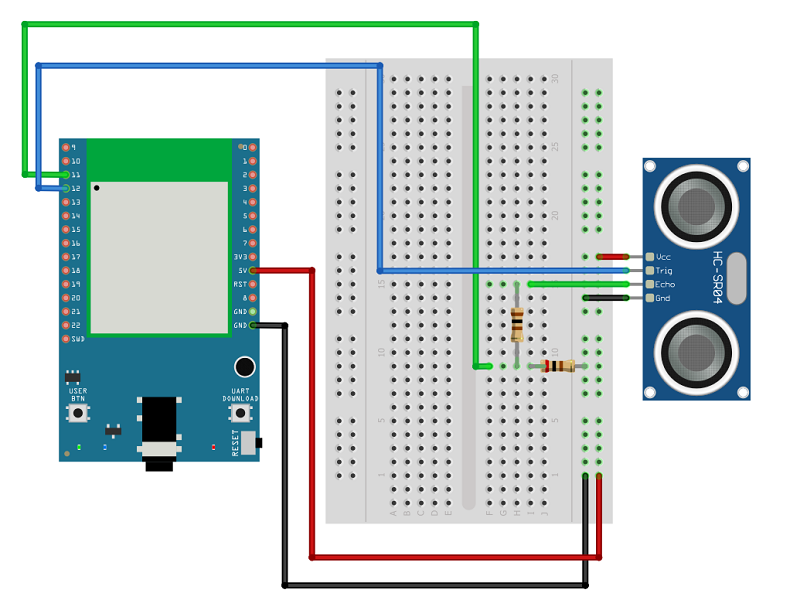
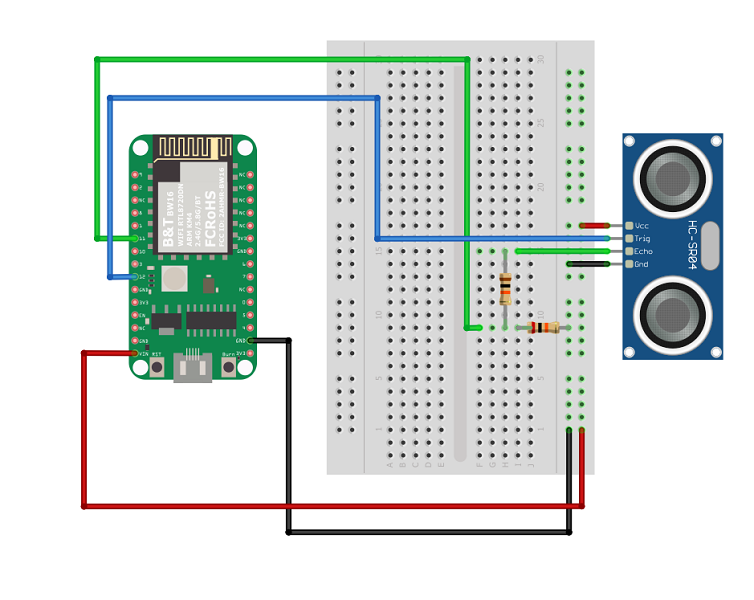
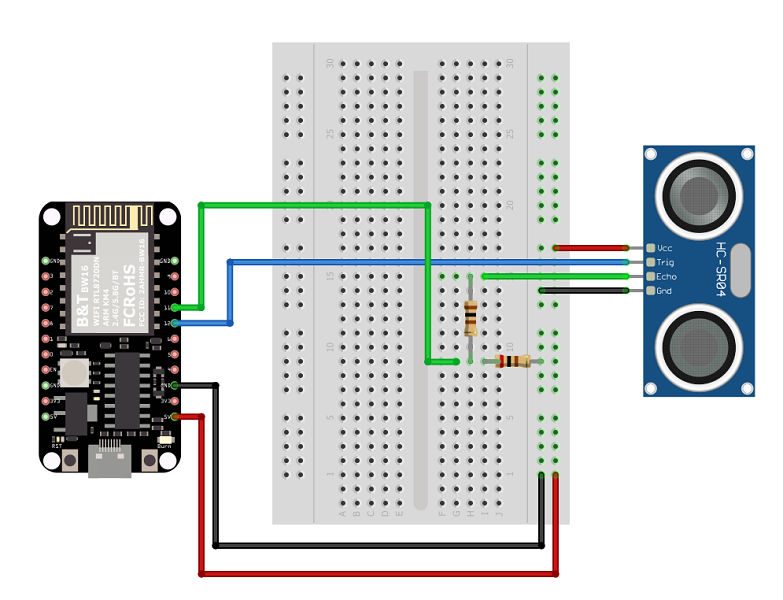
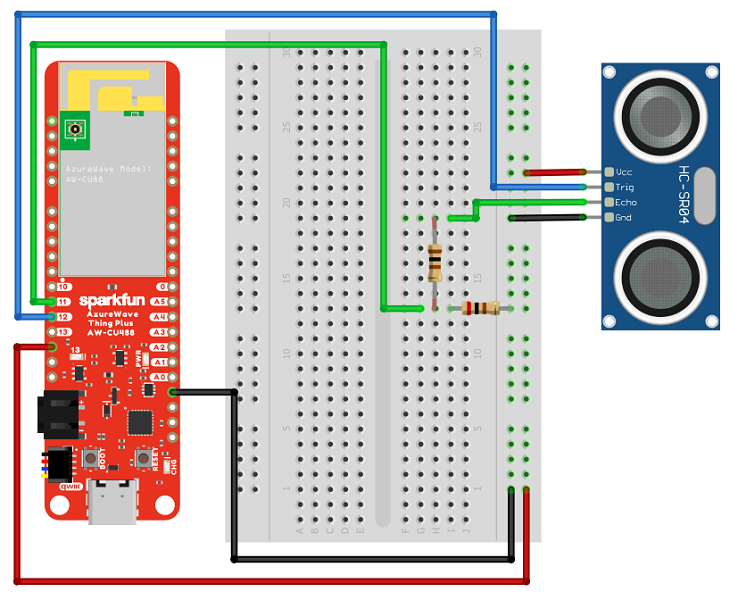
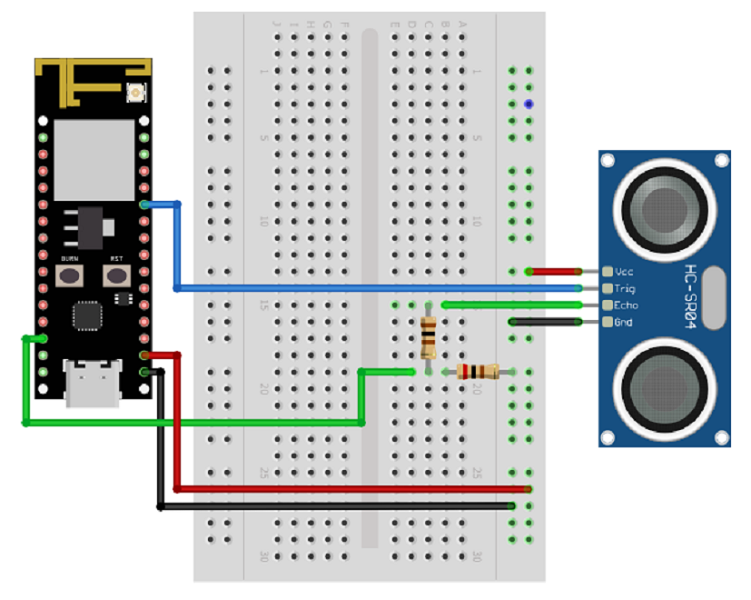
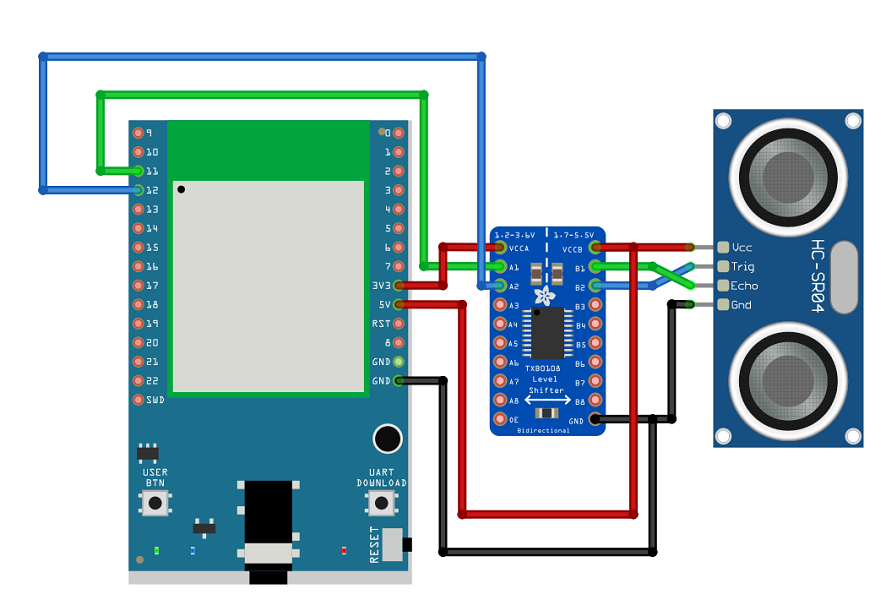
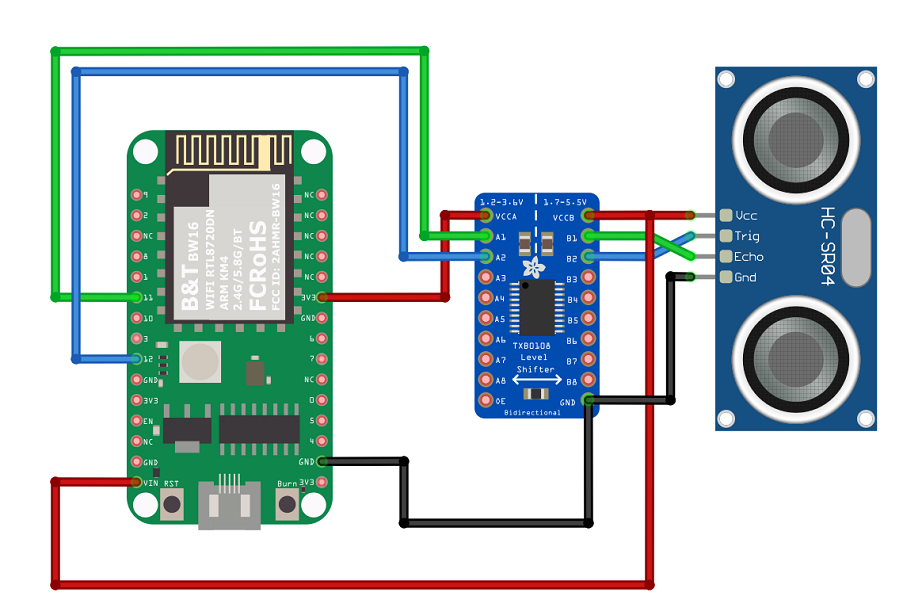
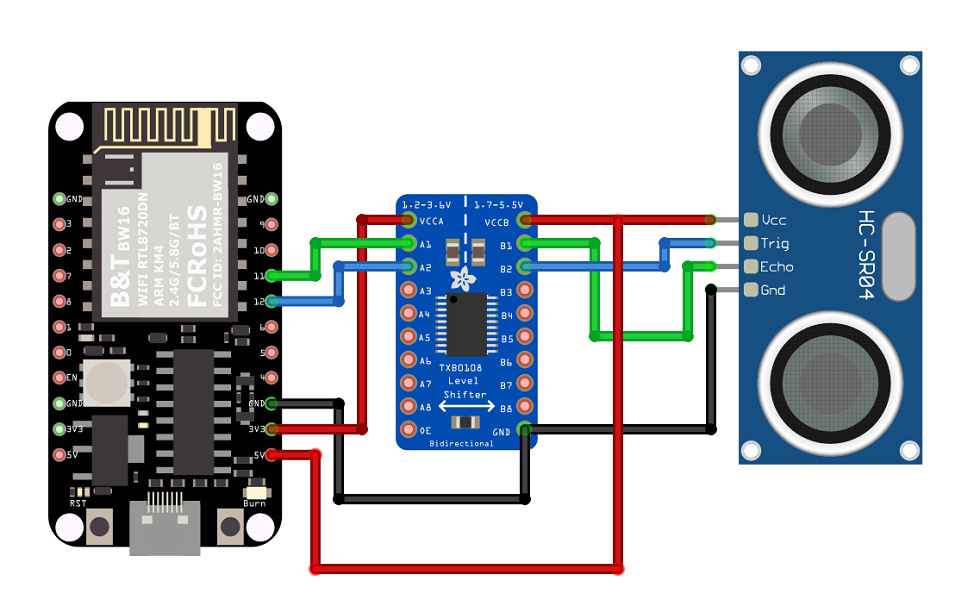
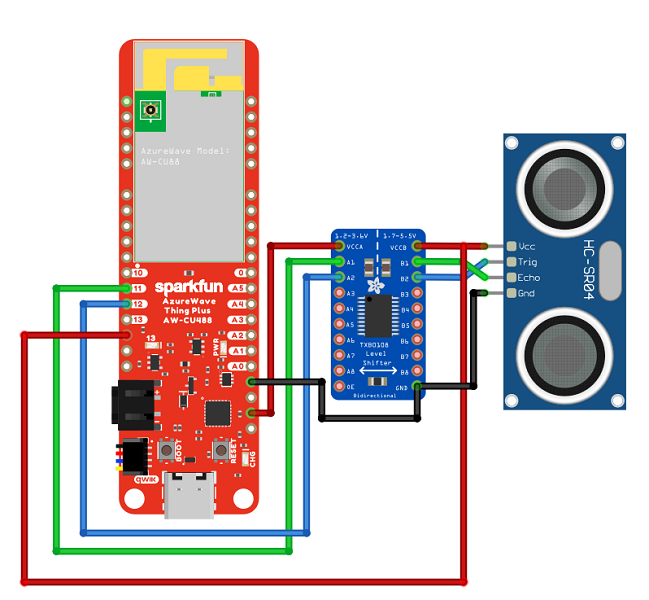
假設音速是340 m/s,那麼音波在空氣中行走1公分所需的時間是340 * 100 * 10^-6 = 29 us。 HC-SR04的音波從發射出到折回是兩段距離,所以HC-SR04與目標物的距離是 (time / 29) / 2 = time / 58。 HC-SR04的工作電壓是5V,為了避免ECHO這根GPIO在pull high的5V電壓會損壞Ameba的GPIO,所以我們需要做降壓的動作,底下是使用電阻降壓的方式:
流程
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
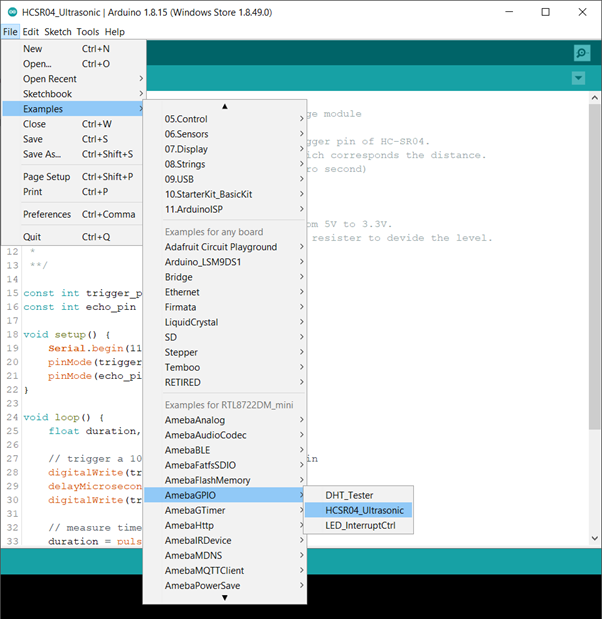
程式的部份,打開“File” -> “Examples” -> “AmebaGPIO” -> “HCSR04_Ultrasonic”
編譯並上傳到Ameba,完成之後按下Reset按鈕。打開Serial Monitor,可以看到每兩秒量出一筆數據。
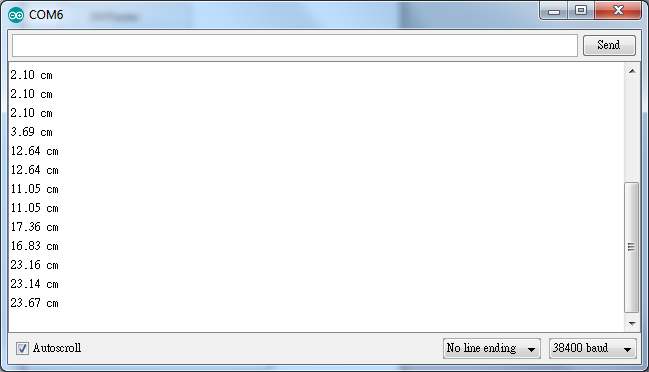
因為HC-SR04使用超音波反射的方式,所以如果遇到表面粗糙或柔軟,音波可能會散射或被吸引,因而影響實驗數據,所以可以先找表面平整的物體做測試。
程式碼說明
每次測量時,將TRIG pin pull high 10us之後再pull low告訴HC-SR04準備測量:
digitalWrite(trigger_pin, HIGH); delayMicroseconds(10); digitalWrite(trigger_pin, LOW);
之後使用pulseIn測量ECHO pin pull high的時間
duration = pulseIn (echo_pin, HIGH);
再根據公式算出距離並印在Serial Monitor上
distance = duration / 58;
