材料准备
- Ameba x 1
- HC-SR04 Ultrasonic x 1
- 降压电阻 or Level converter
范例说明
HC-SR04是一款超音波测距的模组,由于形状像两只眼睛,所以常被装在自走车或机械昆虫上,兼俱美观与实用的角色。它的运作方式,首先我们先在TRIG这根GPIO对它toogle high (即pull high再pull low)。接着HC-SR04会发出8个40k Hz的音波讯号出去,并且将ECHO这根GPIO的讯号pull high。等到音波讯号回来,再将ECHO的GPIO pull low。
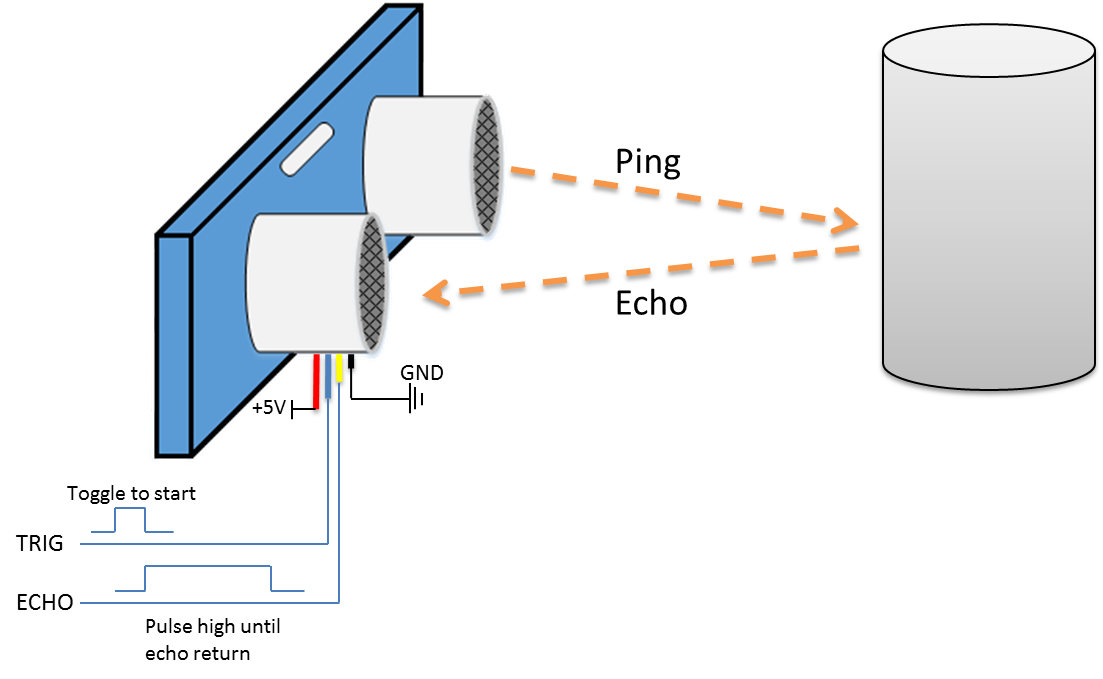 假设音速是340 m/s,那么音波在空气中行走1公分所需的时间是340 * 100 * 10^-6 = 29 us。 HC-SR04的音波从发射出到折回是两段距离,所以HC-SR04与目标物的距离是 (time / 29) / 2 = time / 58。HC-SR04的工作电压是5V,为了避免ECHO这根GPIO在pull high的5V电压会损坏Ameba的GPIO,所以我们需要做降压的动作,底下是使用电阻降压的方式:
假设音速是340 m/s,那么音波在空气中行走1公分所需的时间是340 * 100 * 10^-6 = 29 us。 HC-SR04的音波从发射出到折回是两段距离,所以HC-SR04与目标物的距离是 (time / 29) / 2 = time / 58。HC-SR04的工作电压是5V,为了避免ECHO这根GPIO在pull high的5V电压会损坏Ameba的GPIO,所以我们需要做降压的动作,底下是使用电阻降压的方式:
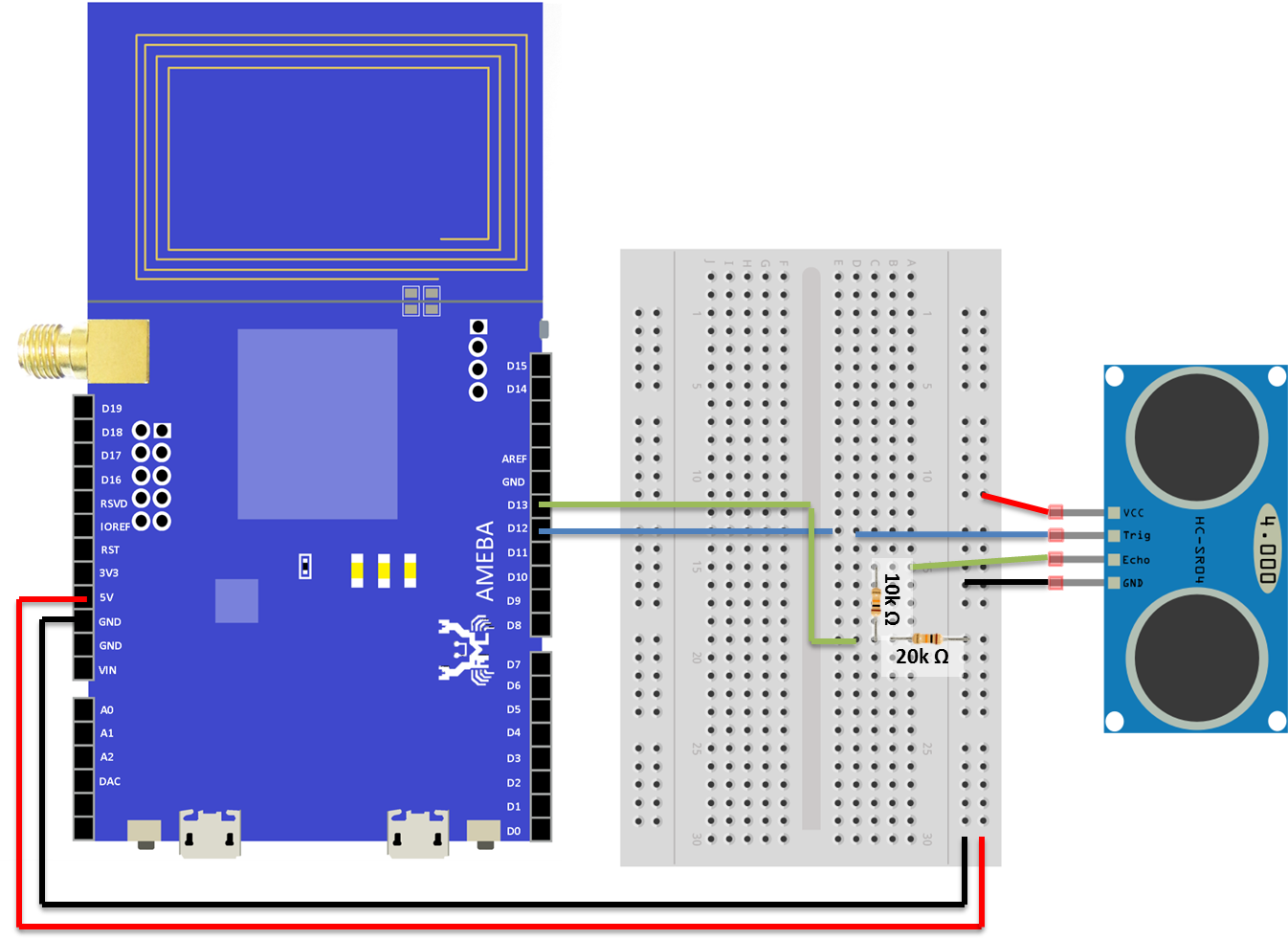 其中电阻只要取适当大小,比例为1:2,图中例子使用10kΩ与20kΩ。 HC-SR04的TRIG这根GPIO可以辨别3.3V的电压,所以不需要特地做电压转换。
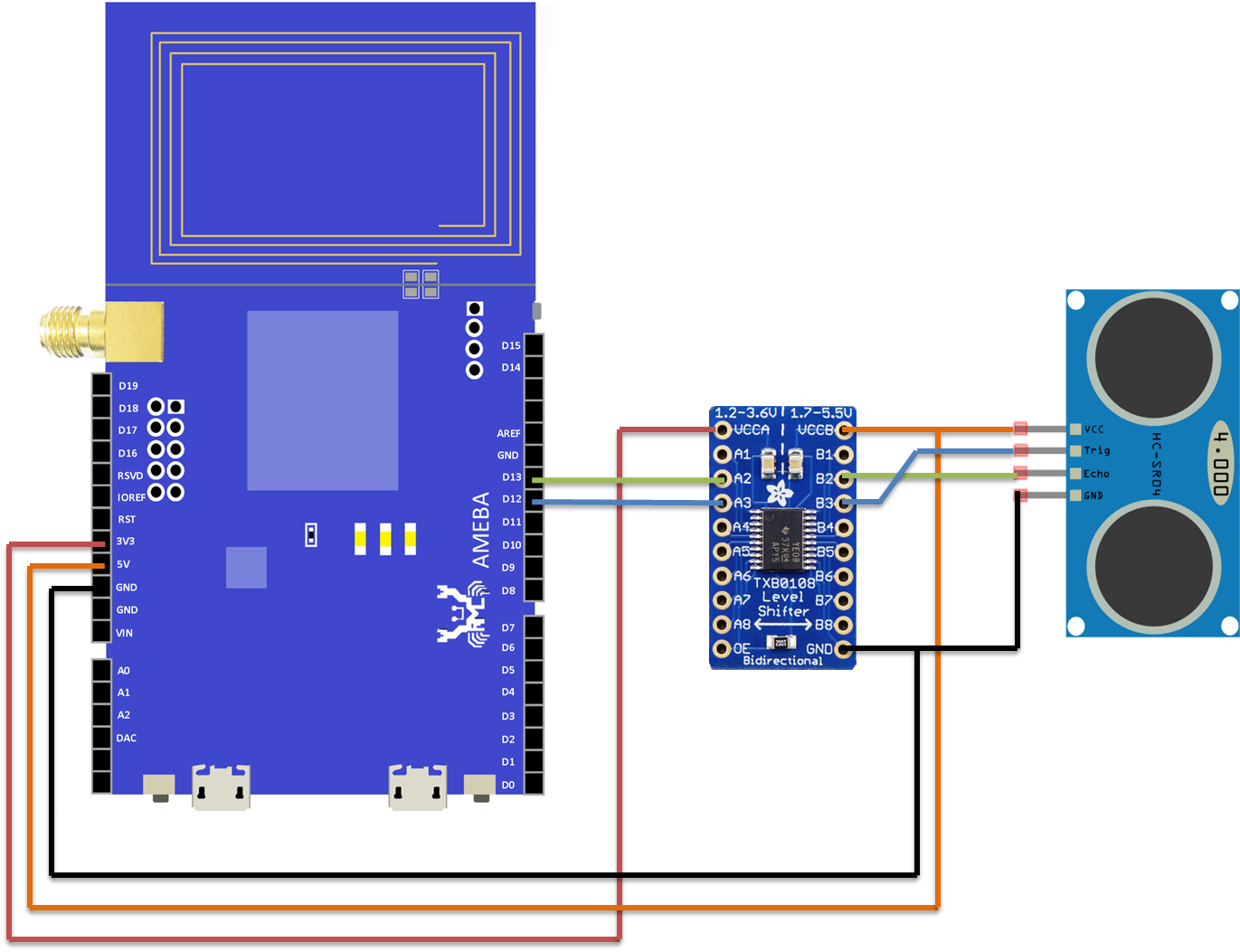
如果不想使用电阻,也可以使用Level converter,以TXB0108 8 channel level converter为例:
其中电阻只要取适当大小,比例为1:2,图中例子使用10kΩ与20kΩ。 HC-SR04的TRIG这根GPIO可以辨别3.3V的电压,所以不需要特地做电压转换。
如果不想使用电阻,也可以使用Level converter,以TXB0108 8 channel level converter为例:
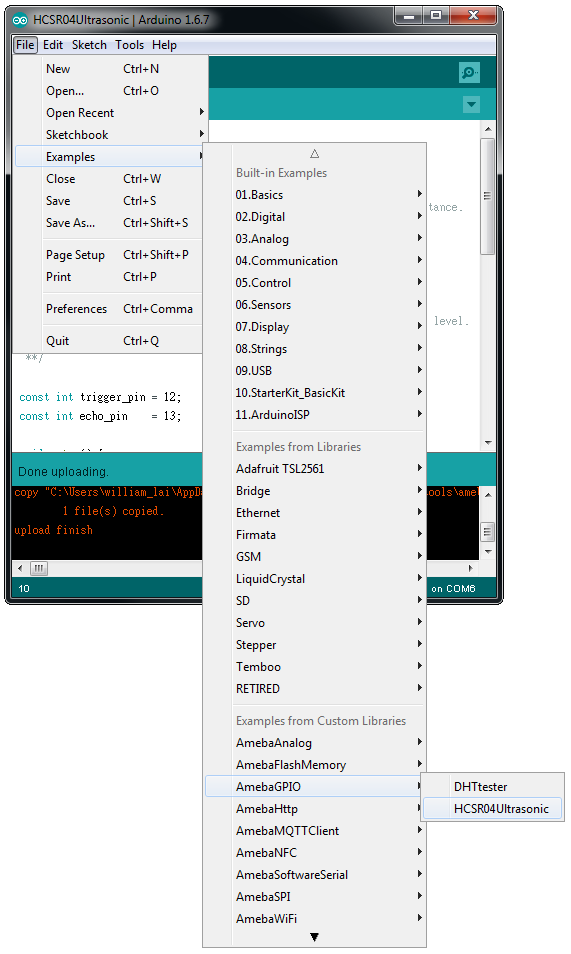
 程式的部份,打开“File” -> “Examples” -> “AmebaGPIO” -> “HCSR04Ultrasonic”
程式的部份,打开“File” -> “Examples” -> “AmebaGPIO” -> “HCSR04Ultrasonic”
 编译并上传到Ameba,完成之后按下Reset按钮。打开Serial Monitor,可以看到每两秒量出一笔数据。
编译并上传到Ameba,完成之后按下Reset按钮。打开Serial Monitor,可以看到每两秒量出一笔数据。
 因为HC-SR04使用超音波反射的方式,所以如果遇到表面粗糙或柔软,音波可能会散射或被吸引,因而影响实验数据,所以可以先找表面平整的物体做测试。
因为HC-SR04使用超音波反射的方式,所以如果遇到表面粗糙或柔软,音波可能会散射或被吸引,因而影响实验数据,所以可以先找表面平整的物体做测试。
假设音速是340 m/s,那么音波在空气中行走1公分所需的时间是340 * 100 * 10^-6 = 29 us。 HC-SR04的音波从发射出到折回是两段距离,所以HC-SR04与目标物的距离是 (time / 29) / 2 = time / 58。HC-SR04的工作电压是5V,为了避免ECHO这根GPIO在pull high的5V电压会损坏Ameba的GPIO,所以我们需要做降压的动作,底下是使用电阻降压的方式:
其中电阻只要取适当大小,比例为1:2,图中例子使用10kΩ与20kΩ。 HC-SR04的TRIG这根GPIO可以辨别3.3V的电压,所以不需要特地做电压转换。
如果不想使用电阻,也可以使用Level converter,以TXB0108 8 channel level converter为例:
程式的部份,打开“File” -> “Examples” -> “AmebaGPIO” -> “HCSR04Ultrasonic”
编译并上传到Ameba,完成之后按下Reset按钮。打开Serial Monitor,可以看到每两秒量出一笔数据。
因为HC-SR04使用超音波反射的方式,所以如果遇到表面粗糙或柔软,音波可能会散射或被吸引,因而影响实验数据,所以可以先找表面平整的物体做测试。
程式码说明
每次测量时,将TRIG pin pull high 10us之后再pull low告诉HC-SR04准备测量:
digitalWrite(trigger_pin, HIGH); delayMicroseconds(10); digitalWrite(trigger_pin, LOW);之后使用pulseIn测量ECHO pin pull high的时间
duration = pulseIn (echo_pin, HIGH);再根据公式算出距离并印在Serial Monitor上
distance = duration / 58;
